May 21-22, 2024

High-Altitude Balloon Autonomous Navigation System (HABANS)
K. Guerre1 and N.M. Hennigan2
1Massachusetts Institute of Technology, Cambridge, MA 02139; 818-675-8981, E-mail: kguerre@mit.edu
2University of Minnesota, Twin Cities, Minneapolis, MN 55455
The objective of the High-Altitude Balloon Autonomous Navigation System (HABANS) is to develop a first-generation prototype of an autonomous high-altitude-balloon (HAB) system that can autonomously modulate its altitude to target specific wind currents in order to control its directional flight. This will be done by engineering a mechanism to modulate the buoyancy of a standard latex HAB system, and couple it with a preliminary software that can use weather data from the National Oceanic and Atmospheric Administration (NOAA) to predict, generate, and control flight paths via wind currents. The development of this new technology has broad implications for environmental researchers as well as meteorological scientists. With this technology, critical atmospheric data collection infrastructure will have broadened capabilities for collecting weather data while significantly reducing the carbon, helium, and physical trash waste of current HAB platforms.
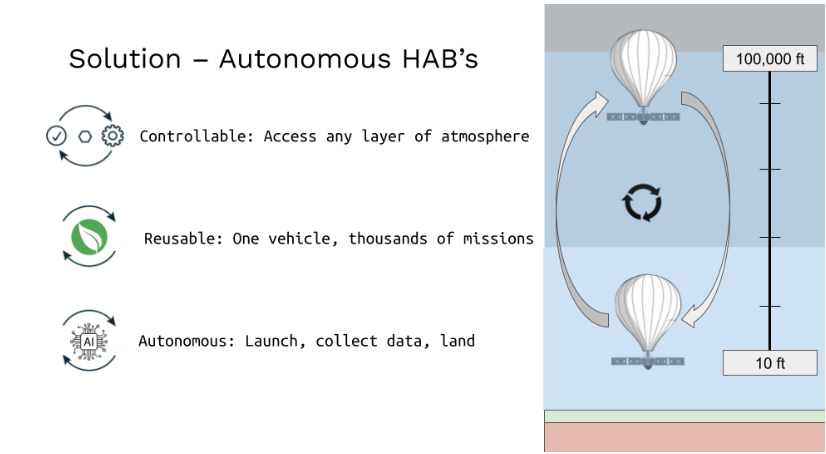
Figure 1. Illustration of HABANS concept demonstrating altitude control between ground and high altitude